A menudo se requiere que los robots de hoy en día interactúen con los humanos de manera inteligente y eficiente, lo que se puede habilitar proporcionándoles la capacidad de percibir el tacto. Sin embargo, los intentos anteriores de imitar la piel humana han involucrado componentes electrónicos voluminosos y complejos, cableado y un riesgo de daño. En un estudio reciente, investigadores de Japón eluden estas dificultades al construir una piel artificial guiada por visión 3D que permite la detección táctil con alto rendimiento, abriendo puertas a innumerables aplicaciones en la medicina, la salud y la industria.
Los robots han recorrido un largo camino desde sus inicios originales para la automatización de alta velocidad. Hoy en día, los robots se pueden encontrar en una amplia variedad de funciones en medicina, rehabilitación, agricultura y navegación marina. Dado que muchos de estos roles requieren contacto humano, se espera que los robots se vuelvan expertos en interactuar con los humanos de una manera segura e inteligente.
Los robots se pueden encontrar en una amplia variedad de funciones en medicina y rehabilitación
Una forma de lograr este objetivo es dotar a los robots de la capacidad de percibir el tacto. En consecuencia, se han realizado intentos para desarrollar "pieles" artificiales capaces de inducir sensaciones táctiles y permitir que los robots sean más conscientes de su entorno circundante, de la misma forma que los humanos. Sin embargo, a pesar de los grandes avances en la tecnología de sensores táctiles, el esfuerzo sigue siendo un desafío. "El principal desafío radica en imitar la complejidad inherente de la estructura natural de la piel que tiene una densidad particularmente alta de mecanorreceptores con funciones especializadas como detectar presión, vibraciones, temperatura y dolor", dice el profesor asociado Van Anh Ho del Instituto Avanzado de Ciencia de Japón. y Tecnología, donde dirige un laboratorio que trabaja en tecnología háptica blanda".
En un nuevo estudio publicado en IEEE Transactions on Robotics , el profesor Ho y su colega Lac Van Duong, un estudiante de doctorado en JAIST, desarrollaron un sistema de detección artificial de alto rendimiento basado en la visión que es de bajo costo y tiene una estructura relativamente simple. y es escalable. Este sistema, llamado TacLINK, puede procesar información táctil e incluso determinar la fuerza de contacto y la geometría de contacto al interactuar con el entorno.
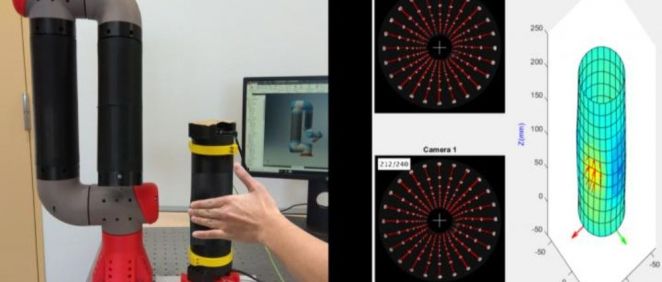
Los investigadores basaron la estructura de TacLINK esencialmente en un tubo acrílico transparente cubierto por una piel artificial
Los investigadores basaron la estructura de TacLINK esencialmente en un tubo acrílico transparente (que sirve como un marco rígido de hueso) cubierto por una piel artificial suave continua con un área de detección de aproximadamente 500 cm 2. Utilizaron caucho de silicona para fabricar la piel artificial debido a su alta elasticidad y tersura. Además, el material podría inflarse para cambiar su forma y rigidez. Los investigadores imprimieron una serie de marcadores en la superficie de esta piel para rastrear su deformación en lugar de incrustar sensores o componentes electrónicos dentro de la piel. Esto redujo en gran medida su volumen, costo y posibilidades de posibles daños.
El sistema de visión constaba de dos cámaras coaxiales dispuestas para formar una cámara estéreo que rastreaba el desplazamiento 3D de los marcadores en la pared interna de la piel. Además, los investigadores emplearon un modelo de elementos finitos (FEM) para estimar la rigidez estructural de la piel. Al combinar los datos de estas dos fuentes, pudieron reconstruir la geometría de contacto y la distribución de la fuerza de contacto simultáneamente. Además, a diferencia de estudios anteriores, este método funcionó para múltiples puntos de contacto.
Con resultados tan positivos, el profesor Ho tiene esperanzas sobre la creación de una futura generación de dispositivos robóticos habilitados para sensores táctiles. "La piel artificial utilizada en nuestro estudio se puede fabricar fácilmente con el método de yeso y, por lo tanto, se puede implementar en otras partes de los robots, como dedos, piernas, pecho y cabeza, e incluso para prótesis inteligentes para humanos, lo que permite una persona discapacitada para percibir las sensaciones de la misma manera que un humano normal ", comenta el profesor Ho con entusiasmo. "Además, también se puede utilizar para diseñar varios dispositivos sensoriales en la medicina, la salud y la industria. De hecho, es especialmente adecuado para el desarrollo de sistemas robóticos en la era posterior a COVID para permitir el servicio remoto con avatares robóticos".