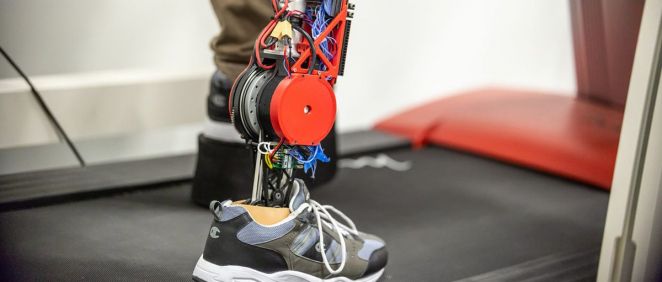
Expertos han diseñado un nuevo prototipo robótico de prótesis de pierna que ofrece una marcha más natural, a la vez que es más silencioso y más eficiente energéticamente comparado con otros diseños.
Concretamente, según ha publicado la Universidad de Michigan, la clave es el uso de nuevos motores pequeños y potentes, diseñados originalmente para un brazo robótico en la Estación Espacial Internacional.
Precisamente, este nuevo diseño aerodinámico ofrece una rodilla que se balancea libremente y un frenado regenerativo, que carga la batería con la energía capturada cuando el pie toca el suelo.
Esta característica le permite a la pierna más del doble de las necesidades típicas de caminar de un usuario protésico con una carga por día.
Este nuevo diseño aerodinámico ofrece una rodilla que se balancea libremente y un frenado regenerativo, que carga la batería con la energía capturada cuando el pie toca el suelo
"Nuestra pierna protésica consume aproximadamente la mitad de la energía de la batería de las patas robóticas de última generación, pero puede producir más fuerza", ha indicado Robert Gregg, profesor asociado de ingeniería eléctrica e informática en la Universidad de Michigan y miembro de la UM Robotics Institute.
Y es que, las piernas robóticas tienen el potencial de proporcionar una marcha mucho más cómoda, pero uno de sus inconvenientes es la rigidez en las articulaciones.
Por ello, según han detallado los expertos, esta vez han diseñado las articulaciones para que fueran lo más flexibles posible. Así, el nuevo modelo de pierna robótica puede funcionar e incluyo reaccionar como lo haría una articulación humana, lo que permite una rodilla que se balancea naturalmente y la absorción de impactos al tocar el suelo.
Son muchos los beneficios que se pueden apreciar al utilizar menos engranajes. Según han explicado, además de habilitar la rodilla de giro libre, la eliminación de los engranajes redujo el nivel de ruido y el frenado regenerativo absorbe parte del impacto cuando el pie protésico toca el suelo.